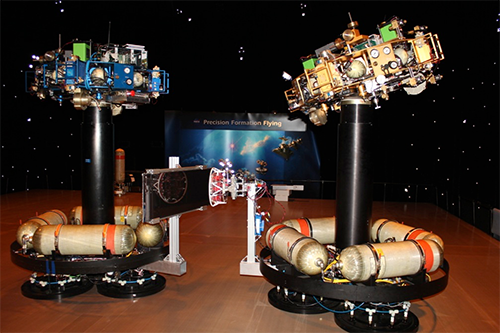
The Formation Control Testbed (FCT) is used for developing autonomous guidance, navigation and control (GNC) algorithms and relative sensor technologies. Its unique capabilities allow high fidelity, system-level ground testing of spacecraft architectures and autonomous operations.
The FCT, colloquially known as the “Robodome,” is a technology development testbed for a variety of research areas and future mission concepts including:
- Precision formation flight (distributed telescopes, Earth science)
- Proximity operations and descent through landing (small bodies and moons)
- Autonomous rendezvous and docking (sample capture, debris capture)
- Vision-based and relative sensor development
- Small satellite characterization and motion studies
- Robotic manipulation, interaction and reactive dynamics
The FCT comprises two air-bearing-supported robots, each with full, independent 6 degree-of-freedom motion. It allows testing with flight-like hardware on a platform featuring 16 thrusters for translation and attitude control, along with reaction wheels, onboard inertial measurement sensors, processing capabilities, wireless communications, controlled lighting conditions for vision-based navigation, and external truth sensing of motion.
A key advantage of the FCT is that it allows investigations into the true dynamics of a spacecraft under thruster control and its interaction with sampling/landing surfaces or docking with other bodies in space. In particular, the JPL Research & Technology Development task System-level Proximity Operations Demonstration for Primitive Bodies focused on developing core technologies for a Comet Surface Sample Return mission concept. The task demonstrated closed-loop spacecraft motion relative to a surrogate comet surface with environmental disturbances and space-like lighting conditions. The controlled motion of the spacecraft met attitude and relative velocity requirements to successfully sample the small body with a candidate sampling tool.
- Carl Liebe (Group Supervisor)
- Kevin Lo