All sorts of JPL employees make their way to the Flight Projects building at NASA's Jet Propulsion Laboratory in Pasadena, California. That is where Dan Gaines works -- he is a flight software engineer playing a key role in JPL’s effort to increase the robustness and autonomy of planetary rovers. From the JPL Library building, for example, the simplest route to his office would be to exit the east end of the building, take the five steps to ground level, then make a right turn toward the corner of Surveyor Road and Explorer Road. From there it is a straight shot down the hill. But…is it?
On this stretch of Surveyor Road, the sidewalk is not contiguous on either side of the street. The slope is somewhat gradual at first, but then the road bends to the left and gets steeper. The hill definitely gets your attention, walking up or down. And that is when the sidewalk is dry -- if it is raining or slick, it would be wise to put down the cell phone and watch your step.
Planning this supposedly simple walk down the hill highlights the amount of thought that goes into daily activities, like getting from point A to point B. It is also a reminder of how much information a Mars rover needs before it can successfully travel -- a rover that does not have our seasoned understanding of the physical world, is not human, and is about 158 million miles away. Even a healthy person with five senses and a map would be challenged navigating Mars’ uneven surface geography.
Dan Gaines is working hard to make sure rovers are more prepared than ever for terrain they might face. Gaines’ background in computer science was his springboard into the field of artificial intelligence. Now he is applying his knowledge toward improving the mobility activities of our planetary rovers -- rovers already operating on Mars as well as the upcoming Mars 2020 mission.
Gaines helped form the Self-Reliant Rovers (SRR) project in response to an internal strategic Research & Technology Development proposal call at JPL. SRR’s goal is to make planetary surface missions more productive by identifying challenges and then developing promising technology to address them. This goal is not necessarily to make the rovers 100 percent autonomous, but to give them higher-level, smarter ‘advice’ while still being controlled by JPL operators on Earth.
What challenges are facing the SRR project? Efficiency and communication are two major ones. Coordinating with rovers on the surface of Mars is mostly driven by the slight difference between the length of Earth days and Mars days (aka ‘sols’). Currently, a rover spends up to 41 percent of its time in what is known as restricted periods -- not able to communicate directly with mission operations. During those periods, data from the rover arrives on Earth too late for operators to prepare new instructions in time for the rover’s next sol. Instead, the rover has to wait. Operators on the ground have to wait, too, which could add up to a lot of unproductive time. It is not lost on Gaines and his team that Mars rovers are valuable tools -- too valuable to let them sit idle.
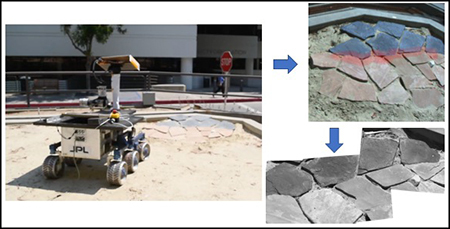
Another challenge, of course, is the Martian terrain. The optical resolution of orbiter and rover cameras is getting better and better, but it is still not good enough to distinguish every subtlety. In a recent experiment using the ground-based Athena rover, Gaines’ team intentionally provided incorrect terrain labels that indicated the surface of a proposed drive would be low-slip. Athena then used the information to generate a secure route to its destination. During the drive, Athena discovered actual slip greater than expected and stopped. Instead of being the end of mobility activity, Athena utilized tools developed by Gaines’ team to recover and create a new path. Athena arrived safely, achieving its goal.
Dan Gaines and the Self-Reliant Rovers Project are actively developing and demonstrating smart new technology; incorporating slip risks into autonomous navigation is just one example. Smarter, more efficient rovers will provide their own state-aware health assessments and be able to elaborate on mission objectives. By reducing lost mission time, rovers of the future could maintain higher levels of productivity, saving money, increasing data return, and enabling scientist-guided, autonomous operations.